
William Dunham
My research at the University of Michigan focuses on applications of model-based control for autonomous vehicle applications including aircraft energy management, spacecraft maneuvering, and transmission management.
I studied Mechanical Engineering at the University of Maryland from 2009-2013 where I was part of the College Park Scholars and QUEST honors communities. I completed a Master's in Aerospace Engineering at the University of Michigan in Spring of 2016 before going on to defend my PhD thesis titled "Advanced Predictive Control Strategies for the More Electric Aircraft" in February of 2019.
Thesis: Advanced Predictive Control Strategies for the More Electric Aircraft
Sponsored by the Air Force Research Laboratory
Studied and developed control strategies for the coordination of more electric aircraft subsystems. Increased power loads in next gen designs will require more extensive electrical architectures that would lead to greater interactions with thermal and propulsion subsystems. In the process of developing novel control solutions and approaches I have become proficient with modeling of turbojet engines and power electronic microgrids, distributed and stochastic model predictive control, hierarchical control, and control across multiple time-scales.

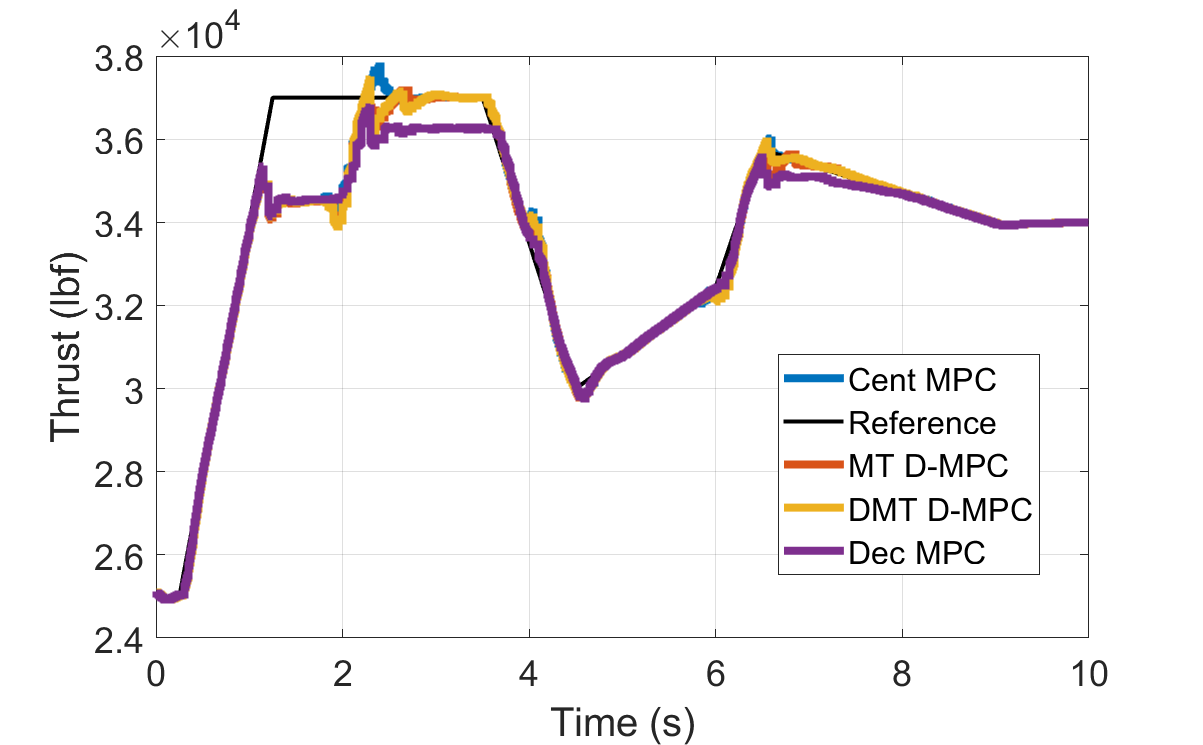
Left: Illustration of the More Electric Aircraft engine and power system. Right: Thrust tracking result comparisons between centralized, decentralized, and two distributed control strategies.
Thesis will be uploaded to Deep Blue repository in the near future, available upon request at [email protected]
Project: Control of Spacecraft in the Vicinity of a Small Body
Developed control strategies for a spacecraft circumnavigating and landing on an asteroid with non-linear and non-convex collision avoidance constraints. The complex gravity of an asteroid is approximated by a simple ellipsoid body and the modeling error is accounted for through disturbance rejection. Current efforts are on incorporating attitude dynamics and control of 6-DoF motion of the spacecraft.
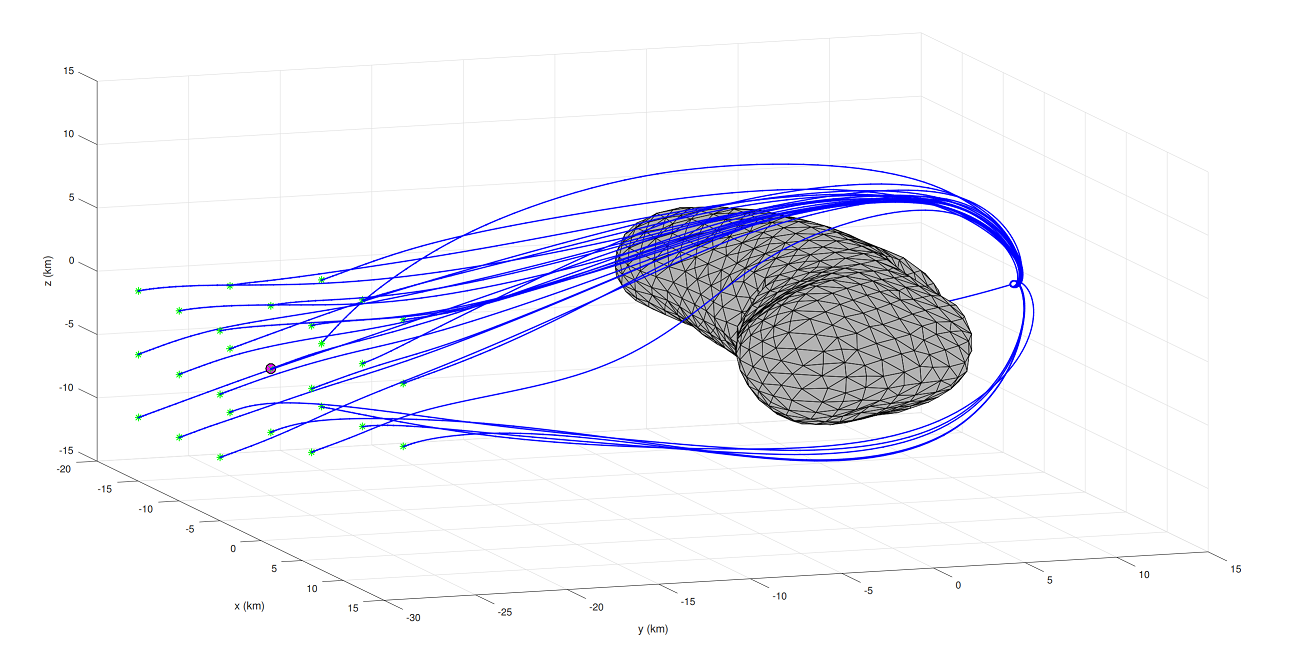
Results produced by varying the initial position with an Extended Command Governor with LQR control strategy.
Click here to access most recent paper
Project: Continuous Variable Transmission Control
Sponsored by the Ford Motor Company
Examined methods to improve the efficiency of the CVT through model based estimation and control leveraging recent advancements in CVT modeling. The current state of the CVT and driveline torque are estimated using an Extended Kalman Filter while multiple MPCs are used to cover the potential operating points of the system to optimize a control trajectory while enforcing safety constraints on slip. The control strategy was validated through simulations on a higher fidelity CVT model.
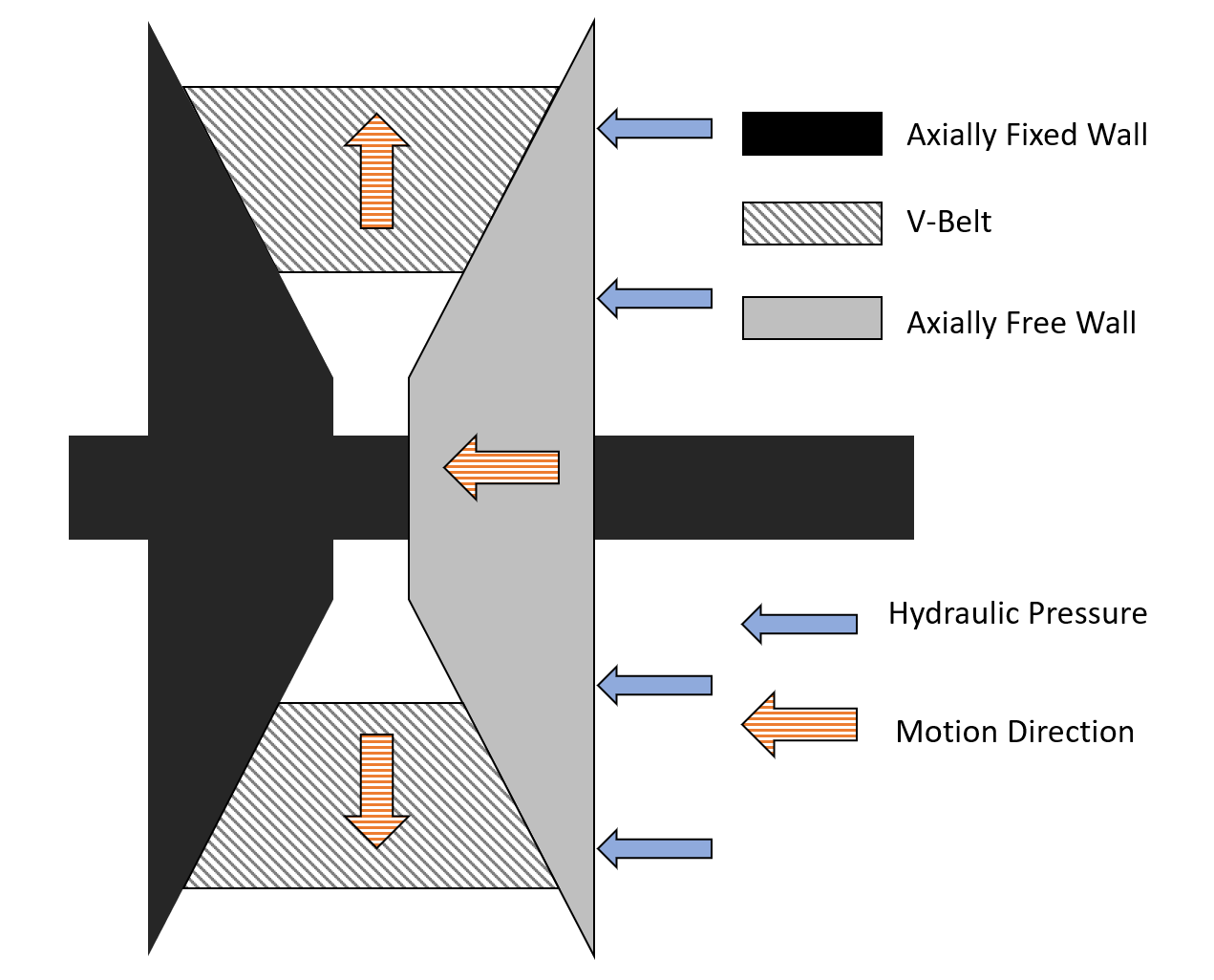
Illustration of the dynamics of one of the CVT pulleys.