

David Yang
Project: LPV modeling analysis on multiple engineering applications
Work Description:
Currently I’m working on two 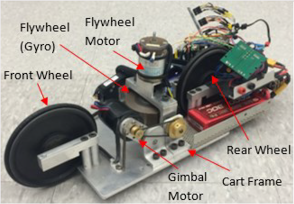 projects, the first one is the controller optimization of the gyroscopically actuated two-wheel cars. Basically, I’m trying to stabilize a two-wheel bicycle like vehicle through multiple different control algorithms. Controller candidates include both linear and non-linear controllers and their control performance were compared based on the benchmark of the transient response. The second project I’m working on is the LPV modeling analysis of the internal combustion engine. Control system identification and controller design optimization are being conducted in the Lab. My colleagues and I are trying to improve the volumetric efficiency and provide higher output torque, which shows a higher demanding tendency in nowadays automobile industry.
projects, the first one is the controller optimization of the gyroscopically actuated two-wheel cars. Basically, I’m trying to stabilize a two-wheel bicycle like vehicle through multiple different control algorithms. Controller candidates include both linear and non-linear controllers and their control performance were compared based on the benchmark of the transient response. The second project I’m working on is the LPV modeling analysis of the internal combustion engine. Control system identification and controller design optimization are being conducted in the Lab. My colleagues and I are trying to improve the volumetric efficiency and provide higher output torque, which shows a higher demanding tendency in nowadays automobile industry.